Sicher werden sich hier jetzt einige fragen: “Was ist denn ein QuadroCopter” ? Nun das ist relativ einfach erklärt. Jeder weiß ja was ein Helikopter ist, daher lässt sich schon erahnen, es ist ein Flugobjekt. Und das Quadro verrät die Anzahl der Motoren, welche das Gerät in Betrieb hat – also vier an der Zahl. Die Motoren bei deinem QuadroCopter sind in den Ecken eines Vierecks angeordnet.
Das Thema ist wirklich äußerst umfangreich – alles mögliche über das Thema kann auf der Internetseite der Entwickler nach gelesen werden. Der Antrieb wird durch vier Brushless DC Motoren realisiert, weil diese im Vergleich zu Ihrem Gewicht optimale Leistungen erzielen und sich somit besonders für den Modellbau-Bereich, insbesondere Flug- eignen. Allerdings ist die Ansteuerung dieser Motoren nicht ganz so einfach, deshalb hat jeder Motor eine Steuerplatine, einen so genannten Brushless-Regler Platine (BL-Regler). Die Steuerung der einzelnen Motoren wird natürlich von einem selbst gesteuert und zwar mit einer Fernsteuerung. Ich habe mich hier für ein 2,4 Ghz Model entschieden, diese haben im Gegensatz zu herkömmlichen 35/40 MHz Typen den Vorteil, dass keine Quarze mehr verwendet werden müssen und es keine Störungen unter verschiedenen Funken geben kann. Auf dem QuadroCopter sitzt noch das “Herzstück” die Flight-Controll Platine (kurz FC), welche maßgeblich dafür sorgt, dass ein Fliegen überhaupt möglich ist. Mit diversen Sensoren, wie Gyroskopen, Beschleunigungssensoren, Höhensensor,… ermittelt sie ständig aktuelle Werte und wertet diese aus um eine Schräglage aus zu regeln. Das wichtigste beim Fliegen eines solchen Gerätes ist, immer zu wissen wo vorne ist.
…denn ist dieses einmal nicht ersichtlich ist ein Absturz fast unvermeidbar. Daher ist die “Nase” des Copters entsprechend zu markieren ich habe hierzu den vorderen Ausleger (Arm) an dem auf dem Ende jeweils die Motoren sitzen mit Signalfarbe lackiert. Außerdem plane ich noch eine weitere Maßnahme mit LEDs.Hierzu auch mal auf der Internetseite, unter “Nachbauten” einlesen man erhält unzählig viel Inspiration! Aber erst einmal genug geschrieben, hier ein Foto von meinem QuadroCopter (noch mit “Lernfüßen”).
Foto ( alt – mit Schutzfüßen )

Hier einmal ein Foto des QuadroCopter mit Schutzschuhe ( mittlerweile schon abmontiert ). Die Schaumstoff Rohre an den Auslegern sind als Anfänger unbedingt zu empfehlen, sie haben mir auch schon einige Propeller gerettet. Es geht verdammt schnell, dass man mal überheblich wird und die Kontrolle verliert. Und bloß vorsichtig sein die Propeller sind ungemein scharfkantig, wer da mit dem Finger zwischen kommt.. naja könnt Ihr euch ja denken! Bei mir hat so ein Propeller schon mal eine Glaskuppel (Stärke ca. 3-4mm) durch geschmettert und blieb heil!
Foto ( neu – ohne Schutzfüße )

Ich muss dazu sagen, auf dem Foto sind immer noch meine aller ersten Propeller montiert, deswegen sehen sie auch nicht so besonders frisch aus =) Ich habe bereits neue auf Vorrat aber werde diese natürlich nicht demontieren solange die alten noch ihren Dienst verrichten. Statt der alten “Schwimmfüße” habe ich nun ein professionelles Landegestell angebaut. Es ist sehr leicht, lässt sich einfach montieren und ist dank der Carbon Stäbe stabil!
Fernsteuerung

Ich habe mich bei der Fernsteuerung für die DX7 von Spectrum entschieden. Sie ist zum einen in der Anschaffung mit knapp 270€ in Ordnung und hat dazu auch noch einiges zu bieten. Außerdem wird die Fernsteuerung in einer wirklich super Qualität geliefert. Das Design hat mich auch überzeugt also gab es für mich keine Zweifel mehr. Also ich kann sie wirklich weiter empfehlen bis jetzt habe ich nichts gefunden was mich stört.
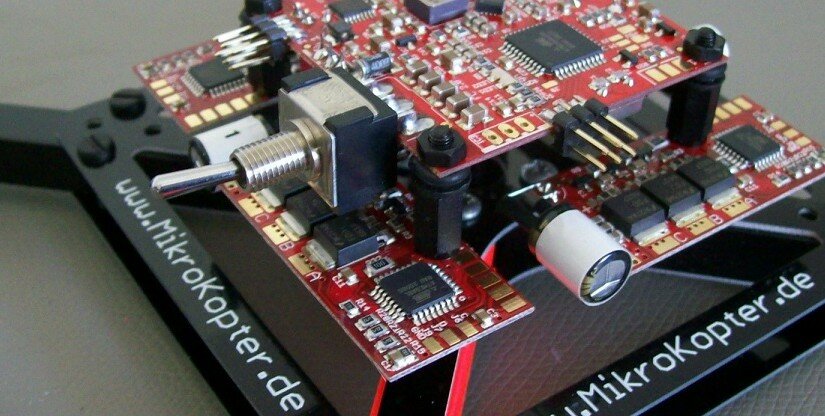
Die Flight-Controll (FC 2.0)
Etwas weiter oben ja schon erwähnt die FlightControll Platine, welche die gesamte Steuerung des Copters übernimmt. Es sind diverse Sensoren an dem QuadroCopter, genauer gesagt an der FlightControll ME montiert, welche sämtliche Messwerte zum nivilieren des Copters liefern. Es sind neben Gyroskopen ( Kreisel ) noch, Höhensensoren und Beschleunigungssensoren vorhanden. Die Platine hat mit 360€ einen ziemlich stolzen Preis bietet aber auch einiges dafür. Nun ich denke hier muss jeder selber wissen was ihm so etwas wert ist. Es sei dazu noch gesagt, dass der Wert nicht so schnell sinkt und man die Platine oder auch den gesamten Copter relativ schnell wieder verkaufen kann. Hier zwei Fotos der Platine, einmal Ober und einmal Unterseite:
➜ Es ist mittlerweile eine FC 2.1 heraus gekommen!


Brushless-Regler (BL)
Die QuadroCopter werden mit Bürstenlosen ( zu Englisch = brushless ) Gleichstrommotoren angetrieben, denn diese bringen gewisse Vorteile mit sich die für Fluggeräte besonders wichtig sind. Allerdings haben sie auch einen Nachteil und der ist definitiv die aufwendige Ansteuerung. Man benötigt eine Elektronik, welche die Motoren ansteuert ( Brushless Regler ), die das synchrone Drehfeld der Motoren erzeugt. Die Motoren haben 3 Anschlüsse, die nacheinander bestromt werden müssen. Mit dem Regler kann man auch die Drehzahl stellen oder regeln. Dies funktoniert bei der BL-Ctrl sowie anderen Reglern ohne Hallsensor-Auswertung nur für relativ hohe Drehzahlen, die beim MK aber durchaus gegeben sind. Ansonsten sind die klaren Vorteile:
- Hohe Leistungsdichte (Leistung zu Gewicht)
- Für hohe Drehzahlen geeignet
- Weitgehend verschleißfrei, da keine Bürsten oder Getriebe (verschleißen kann also nur das Lager)
- Von verschiedenen Herstellern in unterschiedlichen Leistungsklassen erhältlich
Quelle: Mikrokopter Wiki
Es gibt auf dem Markt zwar noch mehrere Versionen von diesen Reglern allerdings erfüllen diese nicht die Anforderungen für einen QuadroCopter, denn die Sollwerte der Regler vom PIC werden nicht schnell genug verarbeitet und so entsteht eine zu lange Zeitspanne zwischen Änderung des Sollwertes und tatsächlicher Drehzahländerung des Motors. Dieser Vorgang muss unter 0,5ms erfolgen.

Brushless Motoren
Ich habe mich für Robbe Motoren entschieden, da sie auch schon in den Foren und Wiki Einträgen auf Mikrokopter empfohlen werden und ich keine großartigen Experimente machen wollte. Also entschied ich mich für dieses Modell:
- Marke: Robbe
- Modell: Roxxy
- Typ: 2827-34

Akku
Bei den Akkus werden grundsätzlich Lithium Polymer Akkus eingesetzt, da sie ähnlich wie bei den Brushless Motoren ein gutes Verhältnis von Leistung zu Gewicht haben. Sprich sie haben eine gute Energiemenge und dabei ein geringes Gewicht. Natürlich steigt auch das Gewicht bei zunehmender mA/h Zahl daher habe ich mich für einen Vergleichsweise kleinen Akku entschieden, weil mir einfach wichtig ist, dass der Copter im gesamten immer noch relativ leicht bleibt, das Design stimmt unter der Akku gut und sicher zu befestigen ist. Weiterhin unterscheidet man auch zwischen der Anzahl der Zellen im Akku, was immer durch die Angabe C gekennzeichnet ist. Bei Mikrokoptern verwendet man entweder 3C oder 4C was sich auch in der Akkuspannung wieder spiegelt. Mit 4C hat man natürlich mehr “Bumms” muss aber auch einge Sachen beachten ( Stichwort Spannungsfestigkeit ). Also habe ich mich hier für ein Modell von Robbe entschieden, welches auch in der Produktions Reihe Roxxy untergebracht ist. Hier einmal die Daten des Akkus zusammen gefasst:
- Nennspannung: 11,1 V
- Kapazität: 2.200 mAh
- Maße: 105 x 35 x 25 mm
- Gewicht: 210 g
- Ladestrom: max. 4C (8,8A)
- Strombelastung: 30C (66A), kurzzeitig bis zu 60C (132A)
- Preis: ca. 30€

Besonderheit – Robbe LiPo
Und die LiPos von Robbe haben noch ein Ass im Ärmel. Wie man auf dem Foto ja unschwer erkennen kann, hat der Akku drei Kabelstränge. Nun einer davon ( Bild links ) ist die normale Akkuspannung der zweite ( Bildmitte ) ist für den Balancer sprich die Spannung der einzelnen Zellen und der dritte ( Bild unten ) ist ein kleiner Stecker mit Verbindung zu einem Chip. Dieser speichert alle Daten zu dem Akku auf: Ladezyklen, Ladestrom, Zellen,… Und wenn man den Stecker mit dem Ladegerät verbindet braucht man keine weiteren Einstellungen vorzunehmen sondern lediglich auf Start zu drücken, denn der Charger erhält alle nötigen Infos vom Chip!
Videos
Hier mal die Dokumentation meines aller ersten Fluges. Ich habe erst mal nur versucht den Copter auf der Stelle zu halten. Mit der Zeit wurde ich aber etwas überheblich, was mir Schlussendlich dann auch zum Verhängnis geworden ist. Ich bin mit dem QuadroCopter in eine Hängelampe geflogen. Die Birne der Lampe wurde mit einem Milchglasschirm ( Stärke rund 3mm ) umgeben. Nunja den hat es richtig zersäbelt, also meinen Finger möchte ich da nicht zwischen haben. Ansonsten ist nichts weiter zu Bruch gegangen und mittlerweile habe ich mich in Geduld geübt und fliege auch schon etwas sicherer. Und hier könnt Ihr euch nun meinen ersten Versuch anschauen: zu Vimeo
LED Flasher
Ich habe ja bereits etwas weiter oben erwähnt, dass beim Fliegen eines QudroCopters, das wichtigste ist immer zu wissen oder zu sehen wo “vorne” ist. Die FC hat nämlich eine bestimmte Richtung in der sie auf den Copter montiert wird. Und würde man den Copter nicht mit diesen “Vorgaben” fliegen, hätte man keine Chance ihn in der Luft zu halten, da sich ja gleichzeitig die Steuerknüppel Bewegungen komplett anders verhalten wird als wir es eigentlich wollen. Nun gut um diese Positionsortung etwas leichter zu gestalten habe ich mir eine Kleinigkeit ausgedacht. Auf der FlightControll des QC habe ich eine weitere Platine gesetzt, welche vier Hochleistungs- LEDs beherbergt. Diese strahlen jeweils in die Richtung eines Armes des Copters. Es wurden 3 blaue LEDs und eine rote LED montiert. Die rote zeigt dabei nach hinten, also muss einen diese LED immer an leuchten um zu wissen, dass der Copter die richtige Lage hat, denn man fliegt immer “hinter” dem Copter, sprich die Nase zeigt von einem Weg daher ist die einzige anders farbige LED auf der Rückseite um die Ortung zu gewährleisten. Okay alle wissen ja, dass diese Hochleistungs- LEDs immer mit einem Kühlkörper daher kommen oftmals als Sternenform. Da aber dieser Kühlkörper für den Aufbau denkbar ungünstig ist habe ich ihn bei allen vier LEDs demontiert. Klar ist dadurch auch, dass ich die LEDs jetzt kaum im Dauerzustand = ein, lassen kann, da sie sonst zerstört werden. Also kam mir der Gedanke, wie es ja auch bei reellen Flugobjekten der Fall ist, immer nur einen Blinkimpuls zu schicken!

Man kann ganz gut die eine rote LED erkennen sie ist die einzige mit einem schwarzen Körper. Die Stromversorgung ist über einen Steckverbinder realisiert und liefert die nötige Energie direkt von der FlightControll. Der etwas breitere schwarze Steckverbinder ist der ICSP ( In Circuit Serial Programming ) Stecker mit dem das Blink Programm auf den PIC12F629 gebrannt wird. Ich habe mich ganz bewusst für einen so kleinen PIC entschieden, da er zum einen Platz spart, wenig kostet und ich sowieso nicht so viele IO Pins benötige. Ich hatte lediglich den Anspruch auf ICSP Unterstützung, einem Internen Takt und SMD Bauform. Hier ist der Schaltplan des Aufbaus. Schaltplan